
Instructor: Tom Igoe
Play Tones
void setup() {
Serial.begin(9600); // Initiate serial communication (for debugging)
}
void loop() {
int analogValue = analogRead(A0); // Read Analog Value from A0
// Mapping analog values from the 200-900 range to the 100-1000 range
int frequency = map(analogValue, 0, 1023, 100, 1000);
// Output the frequency from pin 9 to the speaker
tone(9, frequency);
// Serial output for debugging
Serial.print("Analog Value: ");
Serial.print(analogValue);
Serial.print(" Frequency: ");
Serial.println(frequency);
delay(100); // Delays for stable behavior
}A more complex example
#include "pitches.h"
// notes in the melody:
int melody[] = {
NOTE_C4, NOTE_G3,NOTE_G3, NOTE_GS3, NOTE_G3,0, NOTE_B3, NOTE_C4};
// note durations: 4 = quarter note, 8 = eighth note, etc.:
int noteDurations[] = {4,8,8,4,4,4,4,4 };
void setup() {
// iterate over the notes of the melody:
for (int thisNote = 0; thisNote < 8; thisNote++) {
// to calculate the note duration, take one second
// divided by the note type.
//e.g. quarter note = 1000 / 4, eighth note = 1000/8, etc.
int noteDuration = 1000/noteDurations[thisNote];
tone(8, melody[thisNote],noteDuration);
//pause for the note's duration plus 30 ms:
delay(noteDuration +30);
}
}
void loop() {
// no need to repeat the melody.
}A Musical Instrument
#include "pitches.h"
const int threshold = 10; // minimum reading of the sensors that generates a note
const int speakerPin = 8; // pin number for the speaker
const int noteDuration = 20; // play notes for 20 ms
// notes to play, corresponding to the 3 sensors:
int notes[] = {
NOTE_A4, NOTE_B4, NOTE_B4 };
void setup() {
Serial.print(9600);
}
void loop() {
for (int thisSensor = 0; thisSensor < 3; thisSensor++) {
// get a sensor reading:
int sensorReading = analogRead(thisSensor);
// if the sensor is pressed hard enough:
if (sensorReading > threshold) {
// play the note corresponding to this sensor:
tone(speakerPin, notes[thisSensor], noteDuration);
}
}
}briefly introducing libraries
/*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
*/
#include <Servo.h>
Servo myservo; // create Servo object to control a servo
int potpin = A0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
int sensorValue = 0;
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the Servo object
Serial.begin(9600);
}
void loop() {
sensorValue = analogRead(potpin);
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 210); // scale it for use with the servo (value between 0 and 180)
myservo.write(val);
Serial.print("sensor = ");
Serial.println(sensorValue);
Serial.println();
Serial.print("motor value = ");
Serial.println(val);
delay(1000); // waits for the servo to get there
}
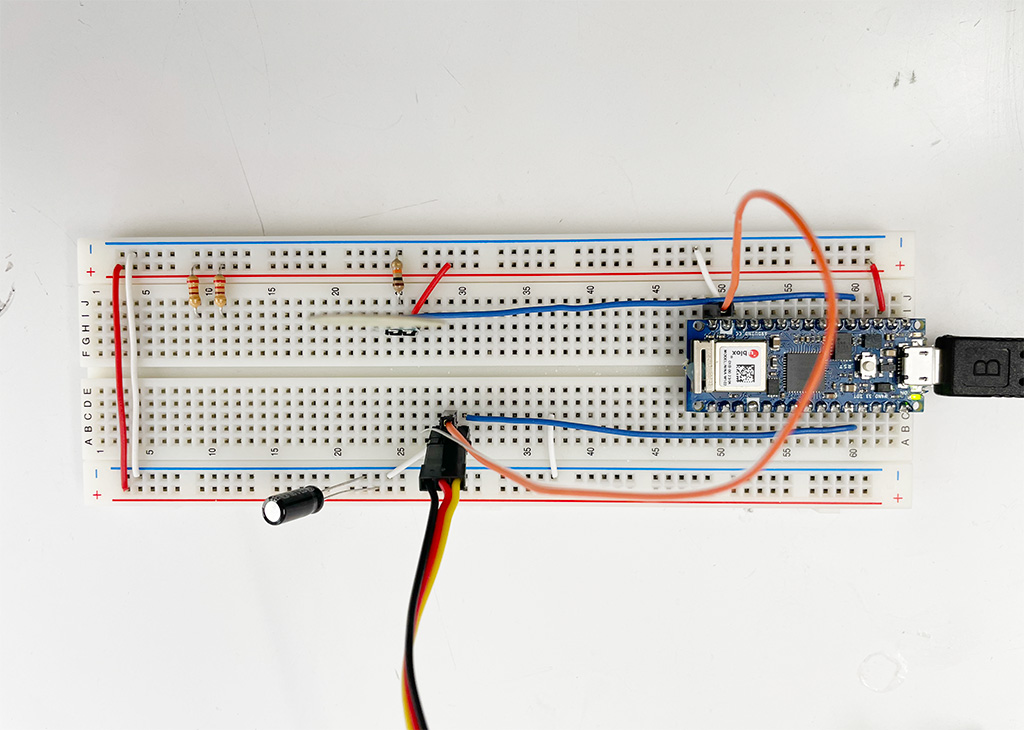
Made a circuit by connecting a servo motor to the analog input. It was used with a 10µF(microfarad) capacitor.
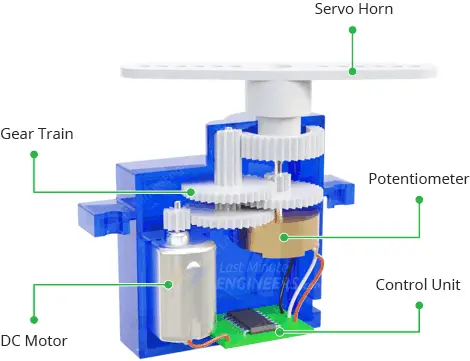
What is a Servo motor?
Question
- The servo motor has vibration when lifted by hand and less vibration when put down, why is that?
- In play tone, why doesn’t “
floatfrequency =map(sensorReading, 200, 900, 100, 1000);” work? It works after changing to “floatfrequency =map(sensorReading, 0, 1023, 100, 1000);“.